





Description
With GPS you are able to know where you are, where you're going, and how to get there anywhere on Earth within 30 seconds. This means the higher the accuracy the better! GPS Real Time Kinematics (RTK) has mastered dialing in the accuracy on their GPS modules to to just millimeters, and that's why we had to put it on this board!
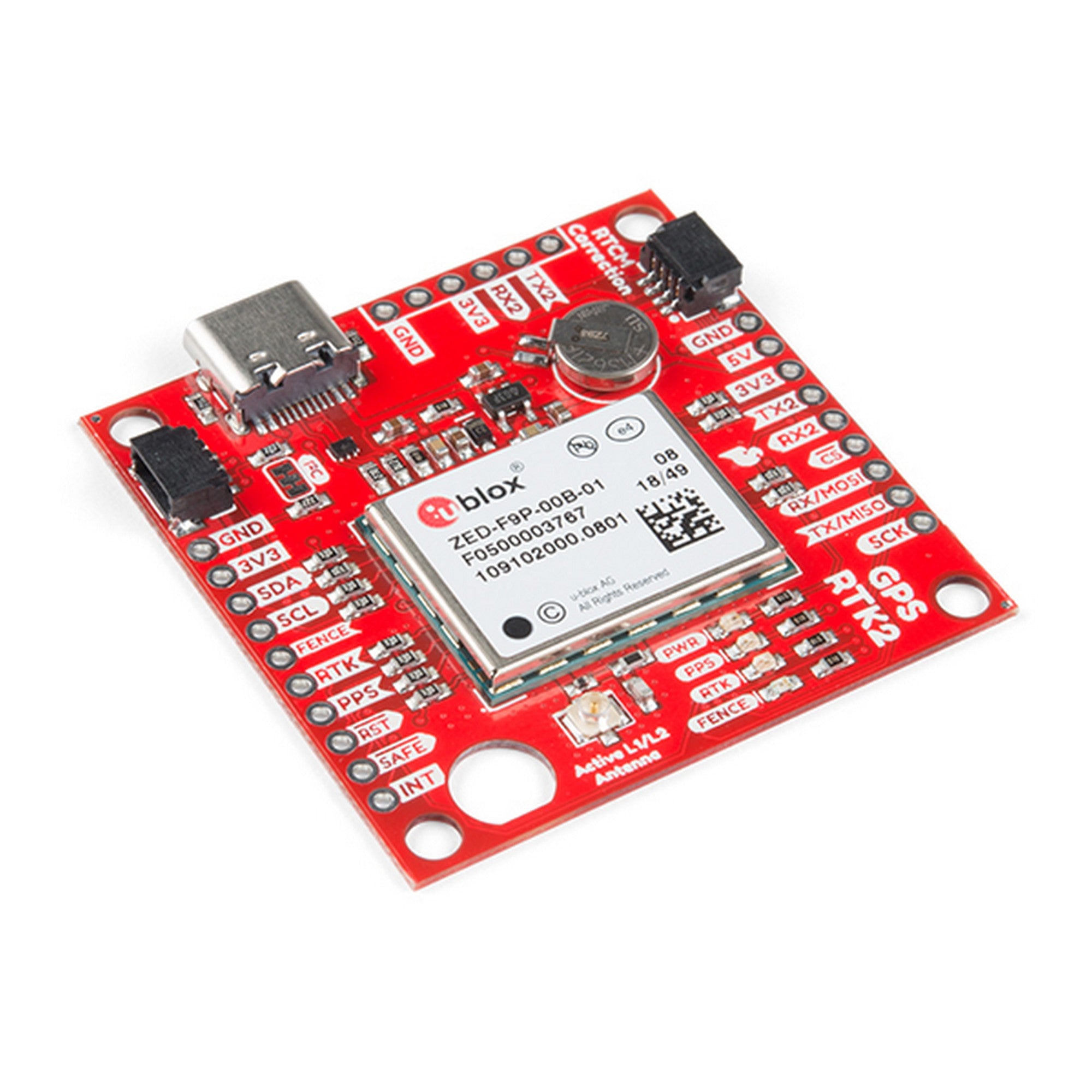
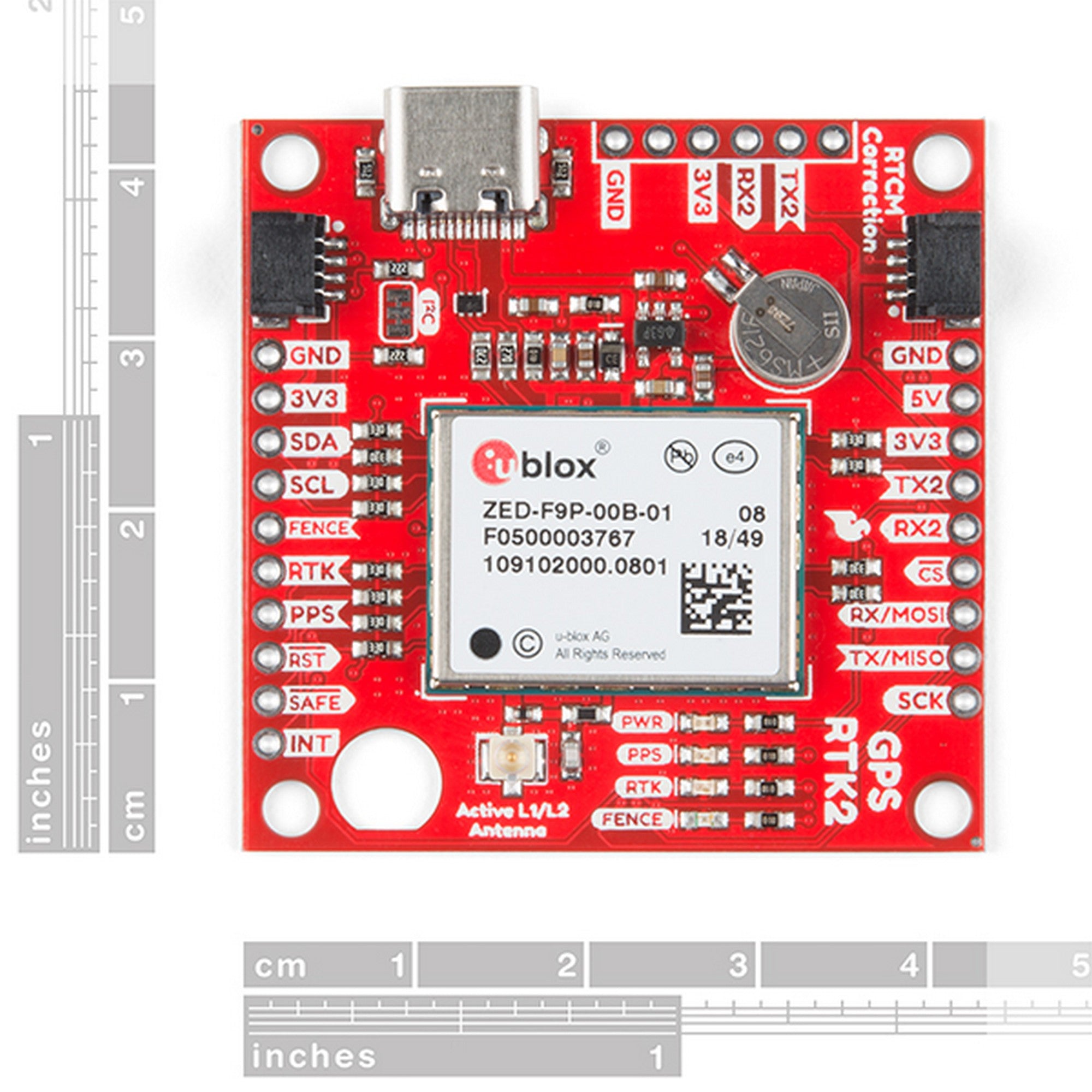
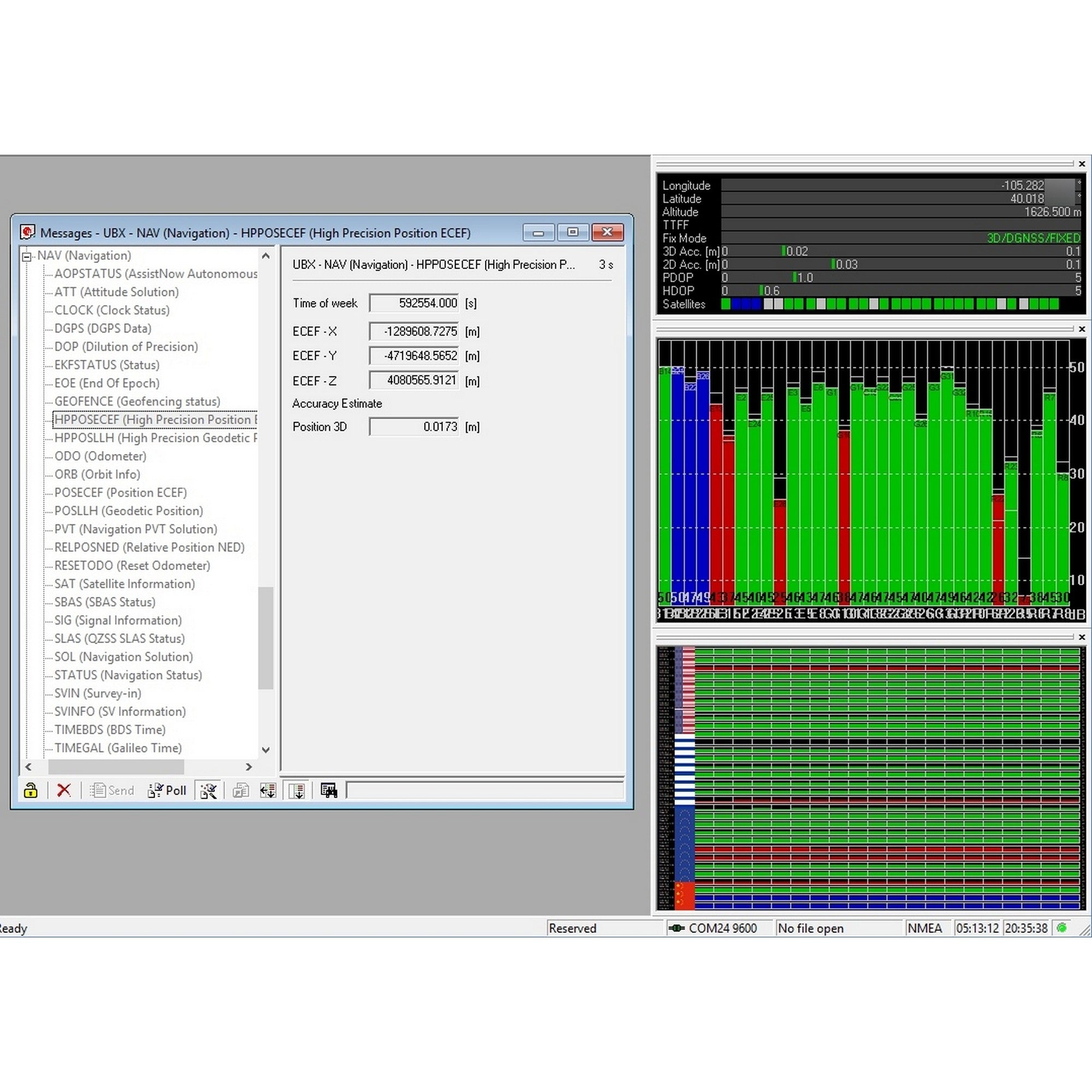
The SparkFun GPS-RTK2 raises the bar for high-precision GPS and is the latest in a line of powerful RTK boards featuring the ZED-F9P module from u-blox. The ZED-F9P is a top-of-the-line module for high accuracy GNSS and GPS location solutions including RTK that is capable of 10mm, three-dimensional accuracy. With this board, you will be able to know where your (or any object's) X, Y, and Z location is within roughly the width of your fingernail! The ZED-F9P is unique in that it is capable of both rover and base station operations. Utilizing our handy Qwiic system, no soldering is required to connect it to the rest of your system. However, we still have broken out 0.1"-spaced pins in case you prefer to use a breadboard.
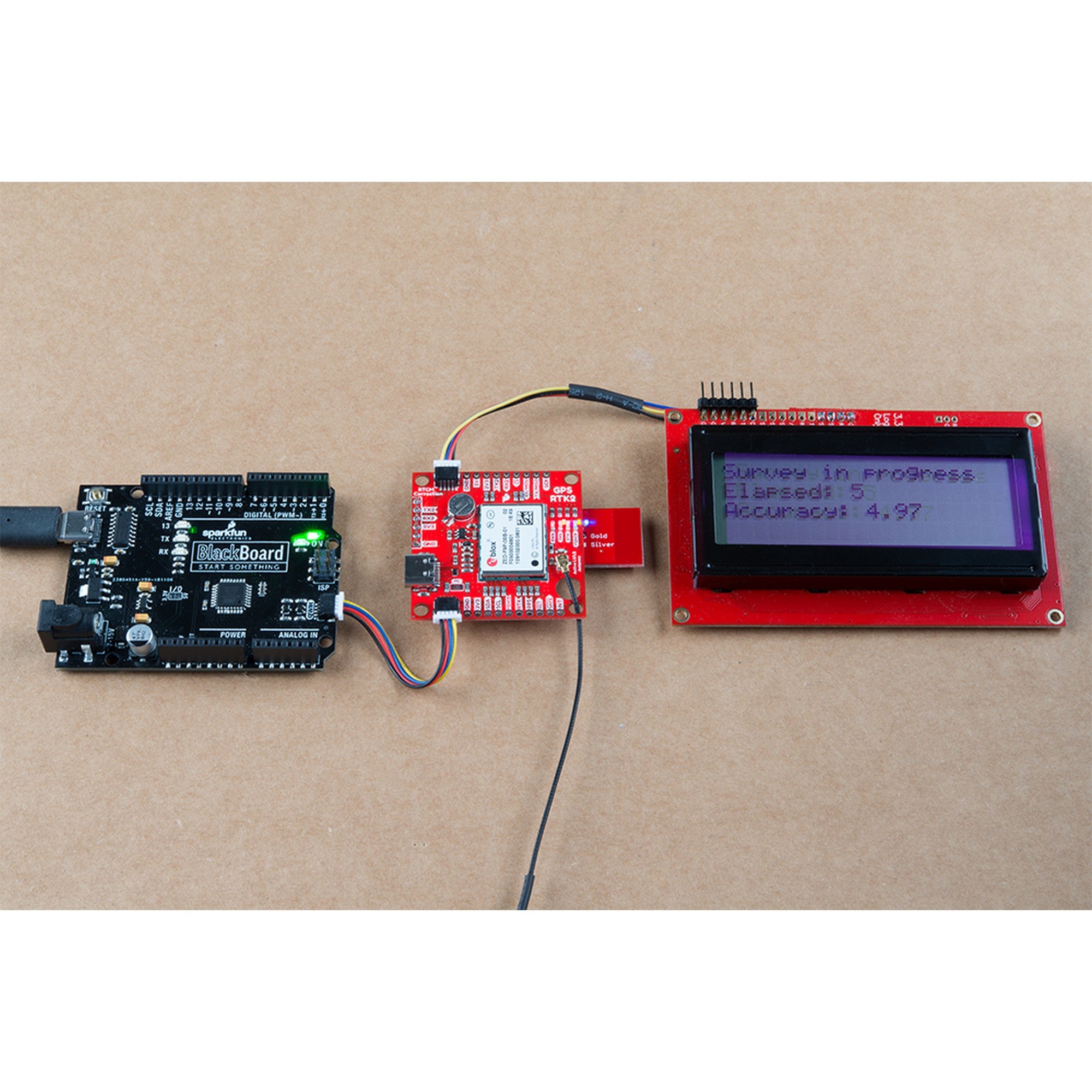
We've even included a rechargable backup battery to keep the latest module configuration and satellite data available for up to two weeks. This battery helps 'warm-start' the module decreasing the time-to-first-fix dramatically. This module features a survey-in mode allowing the module to become a base station and produce RTCM 3.x correction data.
The number of configuration options of the ZED-F9P is incredible! Geofencing, variable I2C address, variable update rates, even the high precision RTK solution can be increased to 20Hz. The GPS-RTK2 even has five communications ports which are all active simultaneously: USB-C (which enumerates as a COM port), UART1 (with 3.3V TTL), UART2 for RTCM reception (with 3.3V TTL), I2C (via the two Qwiic connnectors or broken out pins), and SPI.
We've also written an extensive Arduino library for u-blox modules to make reading and controlling the GPS-RTK2 over our Qwiic Connect System easy. Leave NMEA behind! Start using a much lighter weight binary interface and give your microcontroller (and its one serial port) a break. The SparkFun Arduino library shows how to read latitude, longitude, even heading and speed over I2C without the need for constant serial polling.
NOTE: The I2C address of the ZED-F9P is 0x42 and is software configurable. A multiplexer/Mux is required to communicate to multiple ZED-F9P sensors on a single bus. If you need to use more than one ZED-F9P sensor consider using the Qwiic Mux Breakout.
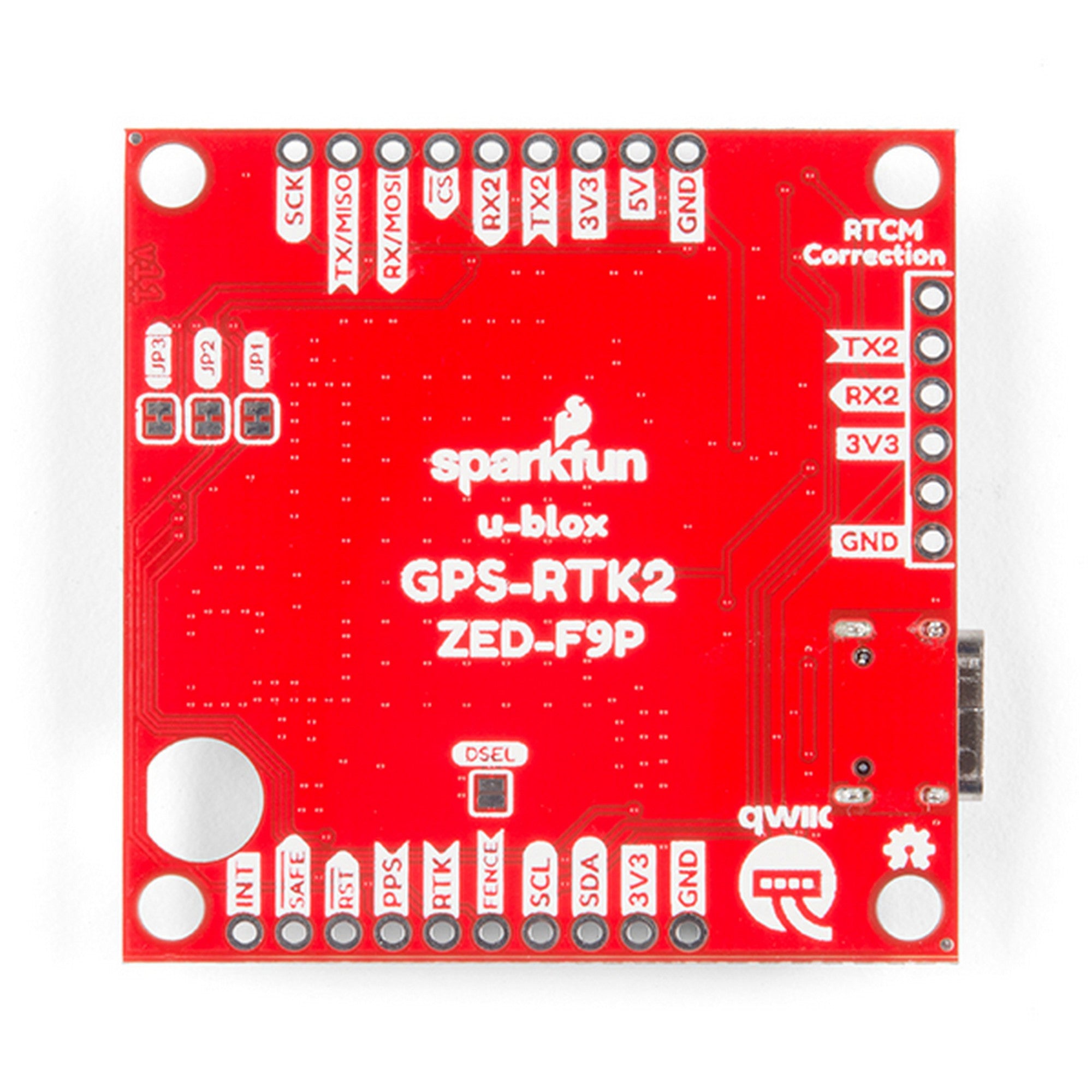
The SparkFun Qwiic Connect System is an ecosystem of I2C sensors, actuators, shields and cables that make prototyping faster and less prone to error. All Qwiic-enabled boards use a common 1mm pitch, 4-pin JST connector. This reduces the amount of required PCB space, and polarized connections mean you can’t hook it up wrong.
The ZED-F9P GPS-RTK2 can also be automatically detected, scanned, configured, and logged using the OpenLog Artemis datalogger system. No programming, soldering, or setup required!
Features:
- Concurrent reception of GPS, GLONASS, Galileo and BeiDou
- Receives both L1C/A and L2C bands
- Voltage: 5V or 3.3V but all logic is 3.3V
- Current: 68mA - 130mA (varies with constellations and tracking state)
- Time to First Fix: 25s (cold), 2s (hot)
- Max Navigation Rate:
- PVT (basic location over UBX binary protocol) - 25Hz
- RTK - 20Hz
- Raw - 25Hz
- Horizontal Position Accuracy:
- 2.5m without RTK
- 0.010m with RTK
- Max Altitude: 50km (31 miles)
- Max Velocity: 500m/s (1118mph)
- Weight: 6.8g
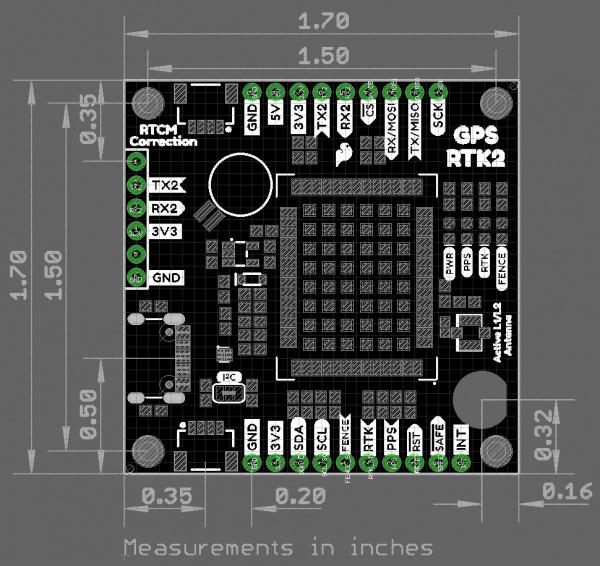
- Dimensions: 43.5mm x 43.2mm (1.71in x 1.7in)
- 2x Qwiic Connectors
Documents:
- Schematic
- Mounting Holes and Dimension
- Eagle Files
- Hookup Guide
- Datasheet (ZED-F9P)
- UBX and NMEA Protocol Manual(ZED-F9P)
- Integration Manual (ZED-F9P)
- Product Summary (ZED-F9P)
- Release Notes - FW1.00 (ZED-F9P)
- Example RTCM output from the ZED-F9P
- U-blox ECCN
- Arduino Library
- GitHub
[Description provided by SparkFun Electronics®]




{kind=link}